
La fabrication du compas
Quand j'ai commencé mon simulateur, il y a maintenant plus de 7 ans, j'étais loin de m'imaginer pouvoir un jour en arriver jusque là et bien on y est.
Dans cet article je vous décris pas à pas l'interfaçage du compas de route à partir d'un compas réel déniché sur Ebay et la modification du montant central de la cabine pour abriter ce compas.
Ce compas sera piloté par aimant néodyme donc il ne sera pas nécessaire de démonter et donc de sacrifier quelque peu l'instrument d'origine.
Pour fabriquer ce compas , il va vous falloir :
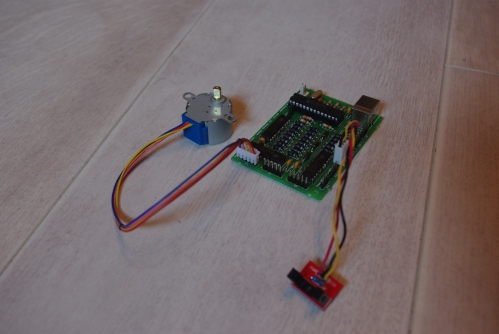
- Un compas en bon état, voilà celui que j'ai trouvé sur Ebay

- Une carte OC USBStepper
- Un moteur pas à pas unipolaire 5 volts réf 28BYJ-48 commandé en chine mais vous pouvez le trouver sur Robotshop.com en référence RB-Prr-26 à 2.64 Euros TTC
Ce moteur est un 64 pas donc 5.625 ° par pas, certain diront que c'est peu en précision mais faisant référence à mes parcours en voilier, je peux vous dire que c'est correct car tenir un cap à 5 degrés près, il faut être fort.
- Une fourche optique réf LTH301-07 chez GOTRONIC code 03501
- Un aimant néodyme carré de 5 mm
On commence par défricher le terrain.
Le plein du compas
Il faut que je refasse le niveau de liquide dans le compas, pour se faire il faut démonter l'arrière du compas et non pas le dessus (la grosse vis sert vraisemblablement d'axe).
Mettre le compas sur sa face avant et dévisser avec précaution l'arrière en veillant à ne pas endommager la membrane qui sert de joint.
A l'odeur, pas de doute c'est de l'essence de pétrole qui sert de liquide, comme il m'arrive de peindre j'ai dans ma valise de peintre du dimanche un flacon d'essence de pétrole Lefranc Bourgeois. Je refais donc le plein à ras bord et le tour est joué.
La membrane est remise en place et on sert les vis alternativement comme pour une culasse, cela fait 15 jours que j'ai réalisé l'opération et il n'y a pas de fuite.
Le test du moteur
Après le plein, vient le test du moteur, pour çà on branche la carte USBStepper, on la déclare dans sioc.ini avec le bon IDX
cela donne chez moi, une ligne : USBStepper = 0,37
Le moteur unipolaire est équipé d'un connecteur, il suffit de le brancher sur le connecteur J6 (moteur-1) avec le fil bleu vers la gauche quand on regarde la carte avec les connecteurs moteurs en bas
Pour les premiers essais, je n'ai pas alimenté la carte en 5 volts et çà fonctionne, c'est vrai qu'il n'y a qu'un seul moteur et que j'ai un Hub USB alimenté.
En ce qui concerne la fourche optique, il faut veiller à la souder du bon coté de la plaque j'ai cramé la première pour avoir fait l'inverse, le photo-transistor a chauffé et n'a pas aimé le traitement,ne pas oublier la résistance de 220 Ohms pour alimenter la led.
Cette fourche se connecte sur le connecteur J9 avec le + à droite en regardant les connecteurs placés en bas, le moins à gauche et donc le signal au milieu, regardez la photo ci dessus.
Pour la programmation SIOC d'essai j'ai mis une seule ligne comme ceci :
Var 0990, name compas_step,link USB_stepper, output 1,posL 6, PosC 0, PosR 4, type H
Dès le branchement et lancement SIOC le moteur tourne, il suffit pour les essais de lui coller une bande qui occulte la fourche 2 fois pour qu'il se cale.
Maintenant que le moteur tourne et se cale, je perce l'axe en laiton du moteur pour y insérer un petit clou qui, entouré d'un morceau de gaine thermo occultera la fourche optique pour le calage.
Il est temps de rajouter la programmation sous la variable de compas fs à savoir la 02cc pour piloter le moteur à chaque changement de cette variable.
Var 0020, name fs_compas, Link FSUIPC_IN, Offset $02CC, Length 8 // cap compas
{
l0 = &fs_compas
L1 = &compensateur
&compas_step = l0 * 100
&compas_step = &compas_step - L1
IF &Compas_step < 36000
{
&compas_step = 36000 + &compas_step
}
}
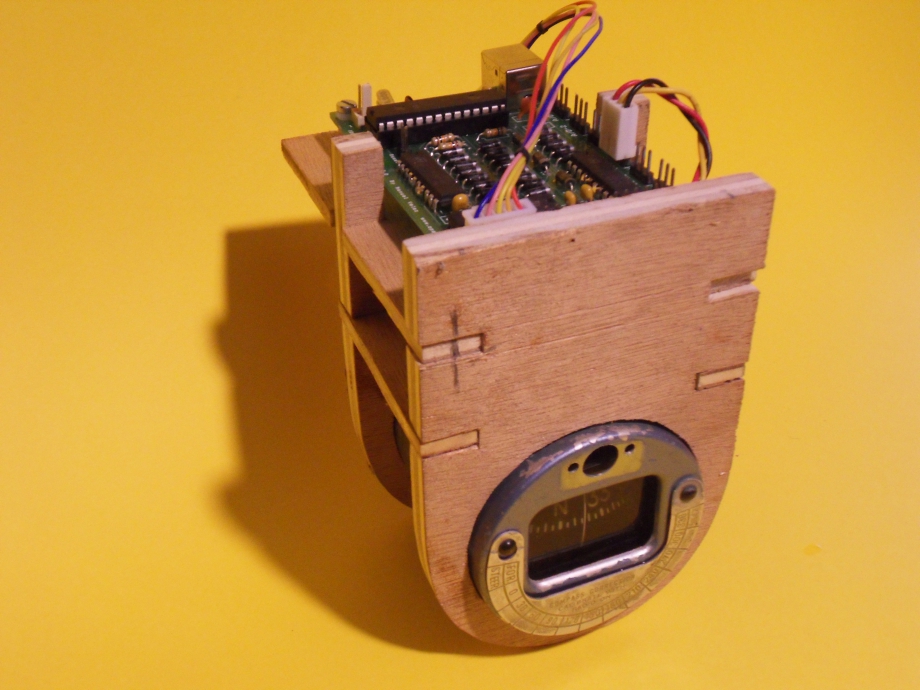
Le moteur avec sa fourche optique est fixé par 2 petits boulons de 3 mm sur la plaque de cp qui est en bas à droite de la photo, il est important que l'aimant soit bien centré au dessus de la grande vis du compas et SURTOUT avec ses pôles N/S alignés à l'horizontale, vous verrez que lorsqu'on colle l'aimant celui ci a tendance à se mettre dans l'axe du moteur et vous vous retrouvez avec un compas qui ne s'aligne plus, le symptôme c'est qu'il n'est plus horizontal . J'ai cherché des heures avant de trouver je croyais que c'était la programmation qui était en cause.
La finition du boitier
Maintenant que les tests sont terminés, il est temps de mettre en place le compas dans le simulateur de façon définitive.
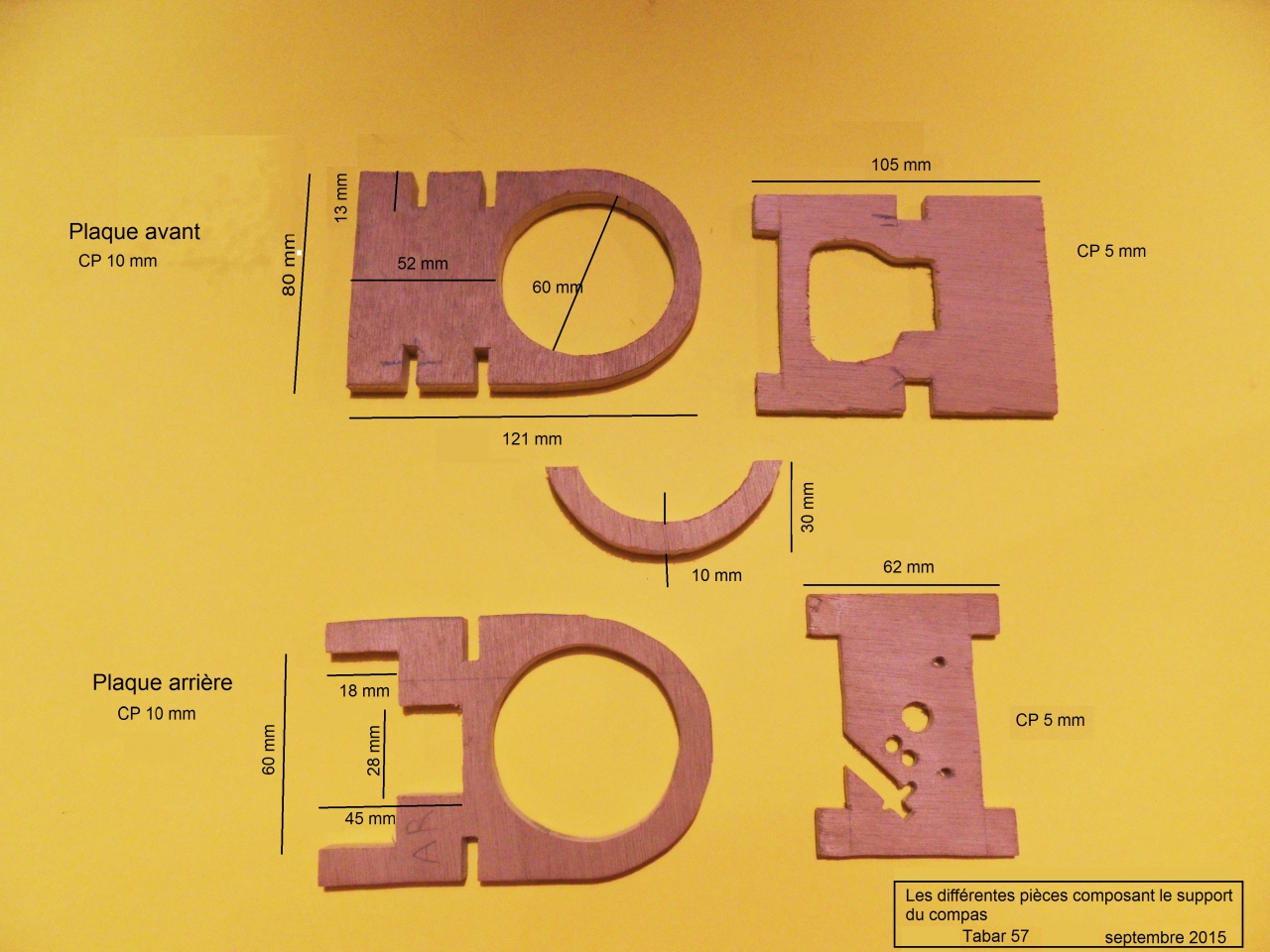
La première chose à faire est de découper les pièces qui vont servir de support à la cage qui va abriter le compas.
Voici une photo des pièces avec les dimensions notées, vous pouvez cliquer sur la photo pour l'agrandir
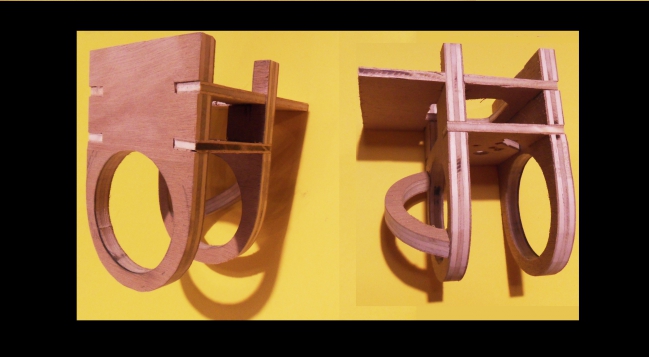
Une photo avec les mêmes pièces assemblées, vous pouvez remarquer que j'ai décidé de monter la carte OC au dessus du boitier pour rendre ce module compact.
Le montage définitif du moteur
Lors de mes essais j'avais collé l'aimant sur un disque de plexi et j'avais placé une bande noire sur ce dernier.
Pour le montage définitif j'ai procédé autrement. J'ai percé transversalement l'axe en laiton du moteur PaP pour y placer un simple clou sur lequel est enfilé un morceau de gaine thermo noire pour en augmenter l'épaisseur et favoriser ainsi la coupure par la fourche optique.
L'aimant est simplement collé au bout de l'axe du moteur, je ne me suis pas soucié de son orientation car le point zéro est réglé par SIOC.
Attention : lors du collage de l'aimant sur l'axe du moteur PAP, veillez à le coller dans le bon sens c'est à dire avec les pôles alignés à l'horizontale car il a tendance à mettre ses pôles N/S à la verticale donc dans l'axe, j'ai cherché l'erreur pendant quelques temps ....la rosace du compas ne se mettait plus à l'horizontale, je ne comprenais plus rien.
Une photo du montage terminé
Il reste maintenant à fabriquer l'entourage du boitier mais avant cela un truc me chagrinait, à savoir la non possibilité de pouvoir régler ce compas comme sur le vrai, je veux parler de la compensation.
Or, sur la carte OC steeper il me reste 3 entrées analogiques non utilisées et je me suis dis pourquoi ne pas associer un potar sur une de ces entrées et permettre avec une variable spécifique de calibrer le compas sans devoir modifier à chaque fois le code SIOC, aussitôt dit aussitôt fait et voila maintenant j'ai un petit potar miniature qui me permet avec un petit coup de tournevis de compenser mon compas comme sur le vrai.
Volià les lignes de code rajoutées
Var 0267, name pot_compens, Link usb_analogic, Input 1, PosL 0, PosC 128, PosR 255 // Pot compensateur du compas
{
L0 = &pot_compens * 30
&compensateur = L0
l2 = &fs_compas
L1 = &compensateur
&compas_step = l2 * 100
&compas_step = &compas_step - L1
IF &Compas_step < 36000
{
&compas_step = 36000 + &compas_step
}
}
Var 0960, name compensateur
Pour finir j'ai branché une led pour le rétro éclairage relié à l'overhead et commandé par ce dernier
A découvrir aussi
- Le Yocke à retour de force
- La restauration d'un vrai yoke de B200
- Réfection d'un bloc Collins CTL22 avec Arduino nano, écran Oled et script lua

Inscrivez-vous au blog
Soyez prévenu par email des prochaines mises à jour
Rejoignez les 125 autres membres